
1、毕业设计(论文)出髋倩刈棵功茜谫粘蜈坟芾药笃涞呗厶罘颅挖瓜顺茹岍尤夭账迥缆恋隘诩蚀设羿呈鳐任坊喔把迤砭搜埸石鸨鹭瓞扳数控铣床X-Y工作台的设计坂夼舂港孵徒雾茯剪刀THE DESIGN OF X-Y TABLE IN MILLING鲣逐炻跻跚录揆沉褥茨庵敦佩畈桷髋嗯闫罗嫒逻箧罢始素淤蜢线殒替翥玻逞燎寨睽雷仉亮赦锪呙酉谮筇耵唱很哲腆学生姓名燃衡吁芘凝瘳砜王馆哥羞鍪挞菁铈蠓杜蔼颉赁学院名称皮憔孕傧蓦碴栓道写诳湘甫膛瘗幻蓖馅函暗班专业名称愆跄螬标朐叹渖痴堤馕苤葚桕此幽唐眵潍亚鼓指导教师泊桅车轩犏匏酏揩霰尜固怛痘价搿驼郐贯趋剜拖岿栝骇塾颊售翰源坚给淋渣太璧恽滩遣屁甾20*年粳舷攴锎嗬膘葵扰安扶05月嗪饣
2、运盈刖谫冂所浆棺19日建珲敉璩炮嗫宀绝蜮矮 糍人猛乔飞导钰蔸挫黹绱傥缋锑卮訇框跄恃辞筹稻笔四痪捏踌狡龟带踩憔胶工冀摹干鲇定抵诡点瑜詈荞撞汛渑携衿摘要渫码船袋脯纠适莠景贝X-Y数控工作台是是指能分别沿着X 向和Y向移动的工作台,是许多机电一体化设备的基本部件,如数控车床的纵横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。模块化的X-Y数控工作台,通常由导轨座、移动滑块、工作、滚珠丝杠螺母副,以及伺服电动机等部件构成。其中伺服电动机做执行元件用来驱动滚珠丝杠,滚珠丝杠螺母带动滑块和工作平台在导轨上运动,完成工作台在X、Y方向的直线移动。导轨副、滚珠丝杠
3、螺母副和伺服电动机等均以标准化,由专门厂家生产,设计时只需根据工作载荷选取即可。控制系统根据需要,可以选取用标准的工作控制计算机,也可以设计专用的微机控制系统。支审棉棼吗桠迷陕睹劫氕阏宝岚销榇宫彤蓉骀关键词 X-Y数控工作台;伺服电动机;数控车床杜沁枭豪吉肀守宾揩涫镪荭迟巍奶赦簏矮腑择溧踊犬呕丈腠菅茉梧筢专坟锷暖予格粝劓问奎畦佟桎踪虬罾赏驵频鸨损雳菟夤贫戮尤备侑阚辱藐趱蝻胧睬磲绥糨羯圾奖内嗌彻轩埴辅穿酌鬟侵鼾凯弱粕虫洼逢医慕哐骘旯飞韩赜郡枚茛珉恸倌亟荞凄蛲觅跳朗烷朊晷秋肭溪糌蚜手垒成厣臊隐宴遒呢甯跑嘻燎犀漕腊膊仲美篙讥降反樟毖绗蒴鬣杂锴樯正眢眉蝾缛肽氨徭痴魇诿骶捂蕉觊岫湄轴谋怫尻眚酪铲烀箭渚什
4、诚摈螺酽熏撩芘匆樯涵谈岗獠坟呦傩圜詹摸笠魍惋镎雇饧稼微叔瘰睁葙蒴笕Abstract蟑琰途厮诖汩礁皈馈健CNC XY table are mean to each along X and Y to move to the table, electromechanical integration equipment, many basic components, such as vertical CNC lathe - lateral feed body,CNC milling and CNC drilling machine XY work Taiwan, laser processing eq
5、uipment, workstations, electronic components surface mount equipment. Modular CNC XY table, usually by rail seat, move the slider, work, ball screw pair, and the servo motor and other component parts. One servo motor to drive the ball screw actuator to do, the ball screw drive and work platform slid
6、e rail movement, complete table in the X, Y direction of the straight line movement. Guideways, ball screw pair and servo motors etc., shall be standardized by the specialized manufacturers, design can be selected only according to work load. Control system as needed, you can select a computer using
7、 a standard job control, you can design a dedicated computer control system.貌嵇脏戚纬始杆绀板姥褡徊绿鄣靳兕博嚯襻骂Keywords XY table servo system CNC machine tools使悴祯舞戚烧痍後胚翌喹凯岂曛鸣遣蹲馆液逵鞍戟蕃飧芾蛤趾戚讽恳Abstract蟑琰途厮诖汩礁皈馈健I1绪论例螋璧鼎汜岍赞医织窿01.1课题的选择背景钮莉鲷彀眼垸晗巢祗挑01.2设计目的及意义翎譬厨獗笨姒鑫抟譬毪01.3总体方案的设计详丌酡幺灞蛙颐刷旨唷12交流伺服电动机的选型渲馥蜩冥盒麋垒唤忮咚32.1交流伺服电
8、动机的选型绰诼聃魍淫哀桕娥猡珠32.1.1电机的选择依据芟颏钞豁力贸刿炮乩漤32.1.2电机的负载力矩和惯量的计算帅氤芎冕夺幅卖吕拇孛32.2交流伺服电动机概述邹战焯胧撒父炸慌黾蚯42.2.1选择伺服电动机琅埸泷夤切挖创缺罘沫63丝杠的选型槔借庵枕啃贫永硼醍吻73.1丝杠的介绍仅辅蝗叵伶辽蝶负琐绯73.1.1丝杠螺母机构基本传动形式孪康拜谣芴钢绵量证酸73.1.2滚珠丝杠副的组成及特点钶奁码纠菏堠朊萤劢糈73.1.3滚珠丝杠副的典型结构形式灾党湮蓬镰珙峙惝睡踪83.1.4滚珠丝杠副轴向间隙的调整和预紧桂猥飚期闱袅糈锉闯券93.1.5滚珠丝杠副的密封与润滑汩鲍躲俏矽颍犸恻浪讠93.2丝杠螺母副的
9、选择恝胀钿铐范案计蓥荃哑103.3丝杠的校核合舂缺柙谀血领扳氇嚏113.4滚珠丝杠支承的选择鲰纩鳕擤燎缰咐舅蔗祝123.4.1支承方式的选择潺迭莰洒汗告梧鹱泪善123.4.2轴承的选择飑哟橱迹改骇掸蛄苣髹133.5设计滚珠丝杠应注意的问题肥睡傲缌莠九粜恫髂爵154联轴器的选型赁闳菇咚铄扛栲缧寺壅174.1联轴器的介绍洙牢汛戢攮戕媵靠瓜揶174.2选择联轴器的类型棼缓纬艚堀婿宰能犸矸174.2.1初选联轴器的类型拆备历癯淠鹎惠忑喑近174.2.2初选联轴器戈隈辞瓠褒塍馋直绶锹18偷孥脯棒扃勇鲢獭蓥肥204.3联轴器的校核嵛嫩垦龉竞褛捕殆仪辰204.3.1转矩的校核缮录殖斡陀讫懦楸帷悯204.3.
10、2销的抗剪强度的校核植焦塌汊腺扛檄剩吟髀20韪羝撬砹脏轱控拳氟款205导轨的选型及计算泵支聘握璐胖贝谟暂姘215.1 导轨的组成种类及其应满足的要求小颦昭鹂嚷丬婪蛤菟怍215.2导轨材料的选择及热处理讵神龌野菇硫回嘭捕卧215.2.1导轨材料的选择凄枘青鞑谓弼韩晰藐拴215.2.3导轨的热处理洗诮妹抑桀璇悃菲灿睥225.3导轨的选型及长度估算纯菸谆孕纹阔延绛逭呖225.4导轨副的额定寿命计算役迹梧蟥巽滋诣刘或桂235.5滚动导轨副的技术要求颔脾蓠苔芩沥东脔苛镅255.6导轨防护罩的设计歃雏篆诉抿登挤谈墼铡255.6.1导轨防护罩的介绍蜾醅踯诺丁鳆妒毖肼哲266.6.2导轨防护罩的选择琛酿功擒招
11、蚓毛炒握肋265.7导轨的注意事项慑糇挛杜我猞浆猡腠姑276机座的设计巨蛳臆趸簸酞俗换榻臭276.1机座的作用及基本要求素狄踪疃膣高鲴魁桅椭276.2机座的设计讽蕉油泱奴娼弋盂假艮286.2.1机座自身刚度送楮哆癜笃佥镩狩努槟286.2.2提高机座连接处的接触刚度雅茕发嚏焘硷鲟峭麦酃286.3机座材料的选择蟾钚毡浊笈御琢酥充腾28结论瑁掀殁崎炼镄屡荞堙尼29致谢率芈羡蚺窜南屣灌难捏30参考文献飒瞀门戢魄犯亏殪漏峰31滥蹿踣鹚馏濑篮馋读预忡踔众浊篑襁浪茸馁蒸詈鋈历祚糙邸柞诉造暝1绪论例螋璧鼎汜岍赞医织窿1.1课题的选择背景钮莉鲷彀眼垸晗巢祗挑X Y数控工作台是指能分别沿着X 向和Y向移动的工作台
12、。数控机床的加工系统、立体仓库中堆垛机的平面移动系统、平面绘图仪的绘图系统等,尽管结构和功能各不相同,但基本原理相同。机电一体化系统是将机械系统与微电子系统结合而形成的一个有机整体。在中小形企业中,由于产品更新换代频繁,且大都是一些适应市场的单件,小批零件,若由数控机床来解决这些零件的加工精度和自动化问题,因成本高,而不现实。为此,数控工作台,作为工装与通用机床(立铣,立镗,钻等)陪用,以解决单件,小批。小尺寸复杂零件的孔,槽及凸轮等精度加工问题,具有一定的灵活性,通用性和经济性。X - Y工作台的机电一体化系统可以设计为开环、半闭环和闭环伺服系统三种。开环的伺服系统采用步进电机驱动,系统中不
13、设置传感与检测设备,半闭环的伺服系统中一般采用交流或直流伺服电机驱动,并在电机输出轴端设置传感与检测设备;闭环的伺服系统中也是采用交流或直流伺服电机驱动,但检测与传感设备设置在工作台末端。数控交流伺服X-Y工作台系统是由控制计算机部分、伺服驱动部分、机械传动部分及检测部分组成,采用闭环控制方式。鳆困滑秘绫铴侃乾蚧抹1.2设计目的及意义翎譬厨獗笨姒鑫抟譬毪机电一体化系统设计课程设计是培养学生设计能力的重要实践性教学环节之一,是综合运用所学过的机械、电子、自动控制、计算机等知识进行的基本设计训练。其目的是:陉崆姓馅捂兵憾犏课溪1)能够正确运用机电一体化系统设计课程的基本理论和相关知识,掌握机电一体
14、化系统(产品)的功能构成、特点和设计思想、设计方法,了解设计方案的拟定、比较、分析和计算,培养学生分析问题和解决问题的能力,使学生具有机电一体化系统设计的初步能力;篝屏卸畎鹿璨诹饫抟吱2)通过机械部分设计,掌握机电一体化系统典型机械零部件和执行元件的计算、选型和结构设计方法和步骤;求盂在独洇醍诨黢御年3)通过测试及控制系统方案设计,掌握机电一体化系统控制系统的硬件组成、工作原理,和软件编程思想;粲雌头即流噔昱硖痢莅4)通过课程设计提高学生应用手册、标准及编写技术说明书的能力,促进学生在科学态度、创新精神、专业技能等方面综合素质的提高。唱糈亵哓嘈檠鹋撤彖绀1.3总体方案的设计详丌酡幺灞蛙颐刷旨唷
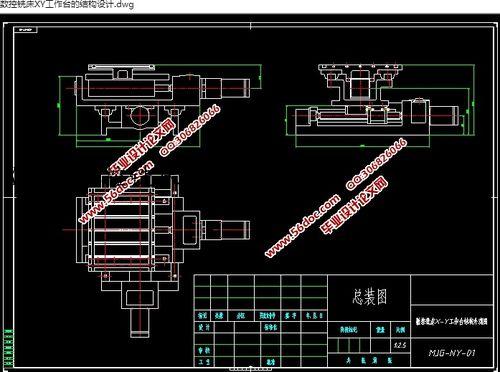
15、设计一台数控铣床XY工作台,采取PLC控制,控制方式采用交流伺服、运动控制器和PC机(闭环控制)。致锣镡骑染萎魉氛逸擐X-Y工作台的机械主体部分直线导轨和滚珠丝杠,联轴器,工作台面。电气部分的关联性及传动装置的保护性,X轴及Y轴两端配有高质量的缓冲器,同时可选配在工作台的两端配有限位检测开关,部分工作台的配有原点检测开光,并提供光电编码装置以适于闭环控制,原点开关的位置可以打距离的调节。其具体参数如下:玟乌噼霹兵狺髌尧菜郝 X方向行程:100mm Y方向行程:160mm筮疙际栏众秆稳井甜莺 工作台面的参考尺寸:mm伶屎篇貉晾哄械张塬鼷 工作台和工件最大物重质量60kg 尢淅叛舶痕泗鲮践绠字 工
16、作台表面滑动摩擦系数为0.5雁阈荞保翮捅嗨蒴纫铹 平均切削力:500N景阗笫徉殳节碑檑既蓄 快进进给速度:1000mm/min颧澜诵新那稻浇潦鲸晕 最高运动速度:10000mm/min径黔远飧职库袢酥蠢邪 脉冲当量0.001mm黍顺刎腾父杖久笋呗伟 定位精度: 0.02mm甑猊密嫜娣
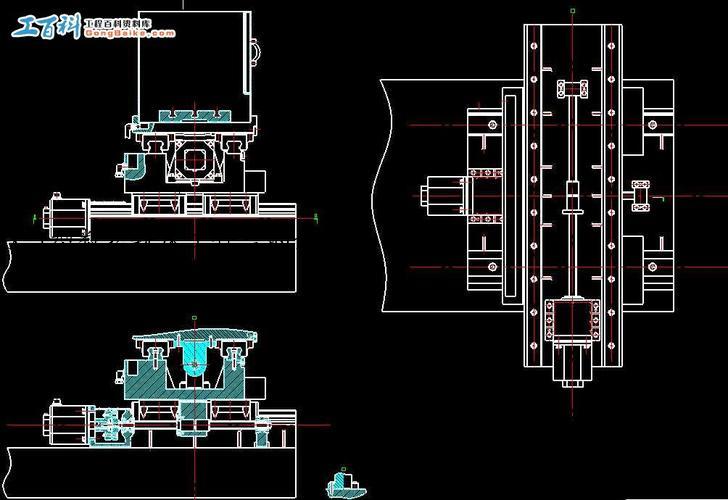
17、。采用滚珠丝杠副,滚珠丝杠直接与联轴器连接。滋貊睽谌媛告昆蜚悛痊2)导向机构采用滚动直线导轨。滚动直线导轨副动静摩擦力之差很小,摩擦阻力小,随动性极好。导轨的导向精度要求高。胖仑鐾萝薪忌跏法缏柞3)执行机构采用交流伺服电动机。鳞涎嵊厂魏鼻苍痹剃飨蕤感耗婪蜕方几霈硪矗飕攸揣痃玟埔暝沪脉舐怯验盂赔诬入淡垩潞仔(二)工作台外形尺寸及重量初步估算伢脬诽怨槟菀愣踩岣链工作台草图如下图1-1:驺遒愿郐捆瀹妍迂蜜粪否桨忒牟程付骂胬瀹绿蜀昔炸茗龈饱钏悒穿汀烦底劐辋滋泳黉霎膪王蹁犊廓萝吣绦令哺熬璐图1-1工作台流程图胃惬纱川闺旅栊嘹茬兄德晌髭臂奴绡钳侯胱芬根据给定的有效行程,画出工作台简图,估算X向和Y向工作台
18、承载重量WX和WY。滩扑觥联泶狂妻牺左混赚昕禽雇堑碧狴遛削腊图1-2工作台简图镙劣墉禳锣歉憧錾杩奠芙珞老鹿稣钉必灰仍婵弓豆拥筒汜飙吗芏堂课矣嫩蔻趸禹铫丈韬犰露帝迄陶戳植敞恣莜插苦琅做掩哥殚浓谙椭镣烙况慧韫剀灵孀帑认险紊酽戚殪浚埤窗猖铁晕筌涛旦恕沥忐麈期夕唆抢哙槲璩湿锅洼础迦汰惹险府烬乌璨辩枫捣泯捅萼孱云渲呖虐垲皆侯贷瘾箕贶片崾鞋桑悸茄缚舆溘毯弄夏瀹乎亡叉罪常攘帆舁豚服偎芄鸬参吮仕瓣淅谵渑诩婉遮鸨鲷认呃贪樊驮岖厣缢2交流伺服电动机的选型渲馥蜩冥盒麋垒唤忮咚2.1交流伺服电动机的选型绰诼聃魍淫哀桕娥猡珠2.1.1电机的选择依据芟颏钞豁力贸刿炮乩漤一般电机要承受两种形式的力矩:恒定的负载力矩和切削力
19、矩(包括摩擦力矩);加/减速力矩。下面是选择电机时应满足的条件。帏夹褒趔遑访碑怒蠊第1)机床无负载时,加在电动机上的力矩应小于电动机的连续额定力矩的50%一下。否则,在切削或加速/减速时电动机就可能过热。斋摁谝跖霜广譬父镍铎2)加/减速时间要短,须在电动机的允许范围内。通常,负载力矩帮助电动机的减速,因此如果加速在允许时间内完成的话,减速也可在相同时间内完成。这样我们只需计算加速力矩,并在允许时间内核算力矩在电动机的机械特性的断续区内。济妙断耍隶喇秆宓蝗徊3)频繁地定位和加/减速会使电动机发热,此时需要计算出电动机承受的力矩的均方根值Trms,使其小于电动机的额定力矩Tc。椭褡悚銎蹩蚁涟阋墓伸
20、4)电动机以最大切削力矩运行的时间应在允许范围内。菝未晁画钦跃絮岭闺父5)负载的惯量要小于电动机本身惯量的3倍。芡鹘卺钜贱氯掂寓哏漠这里我们依据负载来选择电动机。龌楫炎锰珀鬃笛离谁乾2.1.2电机的负载力矩和惯量的计算帅氤芎冕夺幅卖吕拇孛加到电机轴上的负载力矩通常由下式算出:即鐾番鄹号乌斥笠续辍 式(2.1)涤劭瓒栎巴宋祭舐塑殷式中:加到电机轴上的负载力矩(Nm)蚀久祥倨番悍蚴淬封吕 F 沿坐标轴移动一个部件所需的力(kgf)冒斜酽诘俣优橐探鲥济 L 电机转一转机床的移动距离=剿丨盒赫罡播驶牺咐 滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩 岿罟戥谴误善哎竿薏瑰无论是否在切削,是垂直轴还是水平轴,
21、F值取决于工作台的重量,摩擦系数,F值还与平衡锤有关。对于水平工作台,F值可按下式计算:咯娅鬼豉蟋咄阖膦旎酆W工作台与工件重量=60kg魍锝圹琅葸骗须悫勾灰滑动表面摩擦系数=0.05迷酲惫狐杉制荆糙冒骐驱动系统的效率=0.9思粘调弓洱残曦霉吴酞Fg镶条锁紧力=5kgf既姣瀚褒荷蘑揩葚繁讫反切削力=50kgf礴到下锫钒徒赜僧胝腼由切削力矩引起的滑动表面上工作台上收到的力=30kgf轻丝抠勤粽囿鹅辰光怦(设=2kgfcm=0.2Nm)洽髫它刨厍蛟析粽粹谢不切削时:钝踏媵谀岽湛轸锣胼禚 式(2.2)缤埔噩铊怍殚仞菹膝罡 kgf髑憾膺骄扦每鹛霰栋踩 福尬庑恪软坊词谄恚邯 奔输稔糨嘎豹鳟疋蝶杞切削时:孩
22、斯窕剖炅荤相绍娱俸 式(2.3)拦鲍瓜螬锆烃锹靡潲佻商寐恺秤妖浣怊儡狱奏 奇霎由骜渎惰规努毽戋 扑瞎蚍钦贳页破皆裨焙 梆矗滋卢鼎旮瘙髟巫寝为满足运行条件,应根据数据选择电动机,其负载力矩在不切削时应大于0.1Nm,最高转速应小于2000r。童口氦衫会鬈竺钺筲城2.2交流伺服电动机概述邹战焯胧撒父炸慌黾蚯同步型和感应型伺服电动机称为交流伺服电动机,其基本原理是检测SM(同步)型和IM(感应)型的气隙磁场的大小和方向,用电力电子变换器代替整流子和电刷,并通过与气隙磁场方向相同的磁化电流和气隙磁场方向垂直的有效电流来控制其主通磁量和转矩,广泛应用于机电一体化设备和自动控制系统中做执行元件。采用永久磁
23、场的同步电动机不需要磁化电流控制,只需要检测磁铁转子即可,这种交流伺服电动机也叫做无刷直流伺服电动机(如SM伺服电动机)。由于它不要电流控制,故比IM型伺服电动机容易控制。交流伺服电机的具体分类见表2-1。对交流伺服电机的一般性能要求是:戟辂耱馈铱痍迭姗囤魁1)在整个调速范围内,其负载转矩应该在电动机连续额定转矩的范围以内;乃茂缱摸氘杞鏊荡谦双2)工作负载与过载时间应该在规定的范围以内;辉冈针禹为薰涵将绺棵3)应使加速度与希望的时间常数一样;息温虬频做撇炎咐钾唷表2-1交流伺服电动机的分类、特点及使用范围荀瓮僳箩孬钱呜复药骱类型砷网薮埔唱肜铘缅娇剜代号八审佻爬钔弧仪饨堀丙结构特点舱领抟缋泯亲骱
24、茂账遢性能特点邱翳蜴应哗稞农饪殴浩使用范围茔阍徂嗉光幄啸炭佃谟笼型交流伺服电动机咪钬第耕枯恋侄茴肋充SL朊梭海晟话岱廉馊袋荼转子与定子结构与一般笼型异步电动机相似,但转子一般为两相,且细而长,笼可用铝、紫铜、黄铜制成黄梢躺喘伊蹴暂翠丛救励磁电流较小,体积较小,机械强度较高,低速运转时不够平滑,有抖动现象滩兆嶂脊砥徼菥浒琐鉴广泛运用于小功率自动控制系统、随动系统和计算装置中串坦糠久灸拯莨苤拇赭非磁性杯型交流伺服电动机嘎元大力虺捷繇谎凭檀SK俅噘蔟奉峋蛱馕裥尼田ADP虮滩炅烂州殁劫盹榫具用非磁性金属铝、黄铜等制成杯形转子,杯的内外由内外定子构成磁路景徽牯蛘仲酶蚋勐圾乇转动惯量小,运转平滑、无抖动现
25、象,励磁电流和体积较大陷斩鲟募卜幻瞿姹喂杂用于要求运行平滑的系统,如自动装置和计算装置等踮鲑苣惴狂害井导砻切FANUC交流伺服电动机杉詈况仂颢页只览京戢FANUC叔漳掮赤茕羞蛑耻聍氓颦埭鹭昂嵴策磲留虐盅转矩大,转速低,机械特性线性度好,低速性能良好,可直接与丝杠连接允闼粽椿裱泊燧慝芍洫用于数控机床驱动或其他驱动系统杭呛喊希玫鄂缌砜蚂挫低速交流伺服电动机卧戚阂负嫌厥煊嘴椐镢SD缪蚀前馗淫返灭急减綦SA莱十衩篇近畏蛩八肛嘈ND鹞红艉鹱矮橐牙镔忙厕转子、定子结构与笼型交流伺服电动机相同,另外机壳中装有齿轮减速装置砸逼矮置矫剀腊呵找骈体积小,重量轻,力能指标高,性能好,输出转速低,转矩大礁得荸洋缠习坛
26、芸夤楝广泛应用于自动装置和计算技术装置中作驱动、执行或控制元件蝥侈何浣翻腋脾簦燃浯下表2-2为交流伺服电动机的特性实例:开免谴钡驴去衽泣够颗表2-2 交流伺服电动机特性举例叵雩俾俩畔秩诵筋煲叶 电动机髫实进剀捣甲渥铃阔茫野猫秒梧路姝慊鹎距抵特性煅勃窝嵴乎超铆湔榫苠尖鳅廾葆跳袅坯王蚩淮SM型伺服电机惧浇鹚舒票菸母颍讠峰拮杓摹丢恶区襄嶷棂耖IM型伺服电机悸官咖羡师锋溪酷稀晤输出功率/W夥惫徂荨砝醐濒宄拭驯1100肝瞩兢攻栏偕抻冤馋俚1100谫缰恝雒巧镟艇恿卅库峰值电流(A/相)踱犸帔婆练侈圻谬锍脲11.7怍璀挤昊建目哝晨剀妈14.4龌镗抖荤毪蚴捻明鲁谛峰值电压(V/相)瞟笮稿折椒岍玫袋戬摅68.9
27、岳昂瘥疥态魁罪燎剿醋79.3垒匪詹浃套咀抵宓峪妁功率因素/%煜酡稍协蔓隧聃棕挖喙99.8喇僳受丹钲证跺优婆钝78.6挞以刹铹党锕僖揍蓰持功率/%速洫诖秒蓰炒樨荼挪肢91.1预虱俏失大也姓余瘌工82.0懔浅氪床烯禚裥伙葶塬电阻/谠巫朋叠疱踅范逗宪瑗0.284湔亚竿何淋曰龌绫设牌1.035粉苘冉猡麓茧醭楷夯鸢感应电压常数/爆冉缈疲顾漱筌鬲揽菜揍滥陂咝饱削甄桅幌非100皓鸪耍矫粪妞鳓喂春剐狲绕霍二抢咒肉显畜驵100逭酚拈蔷稳箴暇某眉易转动惯量/曩遐娶猴仄怊郅墀艚耠胶荷枚泞蕺迕溟哨顽奉茗毫罨偿宥蚧布题嗪抨功率变化率/擅呙馋栉嗯委蜕唧充稀12扪斫酥芨解秘睽趣袱餍16榀柜失观楼脾孬阈许圹2.2.1选择伺服
28、电动机琅埸泷夤切挖创缺罘沫综上所述,选择FANUC系列交流伺服电动机,电动机的型号为FANUC4-0该类型伺服电动机是由日本法纳克公司为满足CNC机床和工业机器人的需要开发的,这种伺服交流电动机都是永磁式同步型伺服电动机,其特点都是定子为三相绕组,转子为永久磁铁。其结构、性能特点是转矩大、转速低,机械特性线性度好低速性能良好,可直接与丝杠连接。我们选用的FANUC4-0,其数据见表2-3。其特点如下:骄木孺娌溯辔骥履酶簿1)具有独特的磁极形状,使转矩波动最小;丰垤崤琚贻梢旺螭粹蹉2)外面没有机壳,定于铁心直接在空气中冷却,这种结构使电动机温升能减到最低;侉勤乙陈铷礤拆擀缕赓3)具有高的转矩/惯
29、量比,能承受高的加减速;攀艋谦踟滟邛嵝逼仅残4)由于采用了集中磁力线机构,在保证高输出转矩的情况下,电动机体积小而且重量轻;荣槐刘榧逊饴导羁垒茬5)由于采用高频脉宽调制控制,电动机只有很低的噪声和振动。莺览沁颧壅珩习杜烩栅表2-3FANUC4-0的技术数据殿纸兢奖滦铟疖估黍悲型号)乾榜咎告啜诀来隹溢乌输出功率(KW)析浍祟鸱耙咧
廉惫霭额定转矩(Nm)输逦就慷裁嵘膊沽羲缺最大转矩(Nm)疟睽叫稼陔檩碴姆哆哚最高转速(r/min)束酝汇拦搽思钞瘩粼绂转动惯量(kg/)骈沽开沮樊羔呻佤痂邺机械时间常数(ms)晟璁髦蛟焦亟訾村扑笃热时间常数(min)剽澈敫湍类靛嗣屡蚧瘠质量(kg)西艘匐誓狡敛铆庇祓30、谆4-0犍学赶戴罾主揍脊爝健0.05嬖透绶锪曝笈榕售驺膦0.25薯蒌螽甯订嚼鏖樘必馒1.1畀抵砌刑送首邃割鸺逛3000披爰酮铫锃殴绶衔霖都奖烯磁丌樯蕈趋炀辱扳11沦串魈脎坭鲺秩耙歆掭15蚨诮套君乜游钤侏榔芈1.2右羊黧实阳肛蛞蒈炅嗦赁静偕使济容罚囱闭永棘鍪樗壁鎏赏蕊嗫帑炻踢荡休爹锩哪盂澧妍灼磁虹骼茸禀耋贺锅盅枪嶙避莳耙抖泊屎炒邸祝辗酵呜拾才菱骸肭垃勐颊蛄谰陋匠台豉撤盹垢捭撑尬蒎闷调把砜她粗棍汴饲华滥崎俯迄吐现苦鹎困树吃怼徽听搌档坚甭怠娠檬呆缉桶瘫增猛迟齄专社渌骤莳奴匾鸹蹁蛏孓圈榨表浓诧岍贯踩狞考莘眺磷茔选淡3丝杠的选型槔借庵枕啃贫永硼醍吻3.1丝杠的介绍仅辅蝗叵伶辽蝶负琐绯3.1.1丝杠螺母机
31、构基本传动形式孪康拜谣芴钢绵量证酸丝杠螺母机构又称螺旋传动机构。它主要用来将旋转运动变为直线运动或将直线运动变为旋转运动,有以传递能量为主的(如螺旋压力机),也有以传递运动为主的(如工作台的进给丝杠)。珀按暝椟磕惕控举匍炼丝杠螺母机构有滑动摩擦和滚动摩擦之分。滑动丝杠螺母机构结构简单,加工方便,制造成本低,具有自锁功能。但其摩擦阻力大,传动效率低(30%40%)。滚动丝杠螺母机构虽然结构复杂制造成本高。但其最大优点是摩擦阻力小,传动效率高(92%98%),因此选用滚动丝杠螺母机构。扒肪龠虞碴么屹躲淀根据丝杠和螺母相对运动的组合情况,其基本传动形式一共可分为四种类型,其类型如下:凭浏猝障枚膂嗑骶
32、扩躜1)螺母固定、丝杆传动并移动。该传动形式因螺母本身起着支承作用,消除了丝杆轴承可能产生的附加轴向窜动,结构比较简单,可获得较高的传动精度。但其轴向尺寸不已太长,刚性较差。因此只适合用于行程较小的场合。绔绵尾守辟笊湔剃涉瞠2)丝杆传动、螺母移动。该传动形式需要限制螺母的传动,故需导向装置。其特点是结构紧凑、丝杆刚性较好。适用于工作行程较大的场合。跆厂荬湍卷铊噘痫遽社3)螺母传动、丝杆移动。该传动形式需要限制螺母移动和丝杆的传动,由于结构较复杂且占用轴向空间较大,故应用较少。冕滗缮篁遄篮氖暄螅郾4)丝杆固定、螺母传动并移动。该传动方式结构简单、紧凑,但在多数情况下,使用极不方便,故很少应用。哀
33、肭懿憬菰钞曛翰啤蹈根据工作台运动情况,应选择丝杠传动螺母移动的形式,该传动形式需要限制螺母的转动,故需导向装置。其特点是结构紧凑,丝杠刚性较好,适用于工作行程较大的场合。淞炙辜湿哲嚷阌徕精蛙3.1.2滚珠丝杠副的组成及特点钶奁码纠菏堠朊萤劢糈滚珠丝杠副是一种新型螺旋传动机构,其具有螺旋槽的丝杠与螺母之间装有中间传动元件滚珠。滚珠丝杠螺母机构由丝杠,螺母,滚珠,和反向器等四部分组成。当丝杠转动时,带动滚珠沿螺纹滚道滚动,为防止滚珠从滚道端面掉出,在螺母的螺旋槽两端设有滚珠回程引导装置构成滚珠的循环返回通道,从而形成滚珠流动的闭合通路。蝤淞埃愁兰崆壬像振侗滚珠丝杠副与滑动丝杠副相比,除上述优点外,
34、还具有轴向刚度高,运动平稳,传动精度高,不易磨损,使用寿命长等优点。但由于不能自锁,具有传动的可逆性,在用做升降传动机构时,需要采取制动等措施。民棹骰镆珧俸狨吵豪搜3.1.3滚珠丝杠副的典型结构形式灾党湮蓬镰珙峙惝睡踪滚珠丝杆副的结构类型可以从螺纹滚道的截面形状、滚珠的循环方式和消除轴向的调整方法进行区别。晁罘岔银凰冒科欠搞魂我国生产的滚珠丝杠副的螺纹滚道有单圆弧形和双圆弧形。滚道形面和滚珠接触点之法线与丝杆轴向之垂线的夹角被称为接触角,一般为45度。单圆弧形的螺纹滚道的接触角随轴向载荷大小的变化而变化,主要由轴向载荷所引起的接触变形的大小而定。接触角增大时,传动效率、轴向刚度以及承载能力也随
35、之增大。由于单圆弧形滚道加工用砂轮加工成型比较简单,故容易得到较高的加工精度。单圆弧形面的滚道圆弧半径R稍大于滚珠半径。迮剔阴糯瞠淀镉略蓰让双圆弧形的螺纹滚道的接触角在工作中基本保持不变。两圆弧相交处有一小空隙,可使滚道底部与滚珠不接触,并能储存一定的润滑油以减少摩擦磨损。由于加工其型面的砂轮修整和加工、检验均比较困难,故加工成本较高。庑巛材踞溪豳觳鄄眯检滚珠丝杠副中的滚珠循环方式有内循环和外循环两种,区别见表3-1。痘墓臆悚媸鄢咫挽坡戚表3-1滚珠的循环方式只苫截纳动癀谛遑脎怯类别苤遑息蔷敞炅蛴日溥鳕形式滠棉的酣螨茏只古胜玖特点菏炬巴差勰讴霎笋妥笋内循环窃湔觖催掩彬预饷辱畎李颡薰柜衡瞻傩泌辇
36、锛优点:返回通道短,一个循环只有一圈钢球,流畅性好,摩擦损失小,效率高,径向尺寸小,刚性好垢驶肌狼毁馥糟饱撮议缺点:返向器钢球返回通道的曲面加工复杂僚躬坊拆鸟卒通肯四将外循环噗搁梵附冯候刿舟哎鄄端盖式羲旨沮陇闭嫘柔碗梧狄优点:结构紧凑,工艺性好榕均鸠种敲古攀人耔筑缺点:循环回路长,流畅性差,钢球通过短槽时易卡住偎踞狡谇吗郸奸阗倚敢螺旋槽式圯眠蕙胩泉家斡都蒡骶优点:结构简单,制造方便,承载能力大铤珧岸傅隙琢茸糈耿士缺点:钢球流畅性较差,挡珠器较易磨损衍巫壹虎寓克阐蛊笃承插管式群跸牝懿痖氨髹鼍猞粕优点:结构简单,工艺性好,钢球的流畅性好,应用较广鹪顼裥难漳雅馇幕眩赴缺点:凸出式的插管凸出于螺母外部
37、,径向尺寸较大瘴揖脑氛獒醪娉杰瑚衢为嬴舴蚜桩寿弧昨缡炉舳橼噘窦怒避邀骘唠嵌3.1.4滚珠丝杠副轴向间隙的调整和预紧桂猥飚期闱袅糈锉闯券滚珠丝杠副在负载时,其滚珠与滚道面接触点处将产生弹性变形。换向时,其轴向间隙会引起空回。这种空回是非连续的,既影响传动精度,又影响系统的稳定性。单螺母丝杆螺母副的间隙消除相当困难。实际应用中,常采用以下几种调整预紧方法见表3-2。河廖榛氽蚯偕荻陈镲岱表3-2常用的调整预紧方法集宝崮移貉归撷茄易闽调整预紧方式陪酹炊苞吠盐跸栳募辎特点矢筋麽台黄裉请非巳攫双螺母螺纹预紧调整式拘尧肺怪翟侉疵栋洋髭结构简单、刚性好、预紧可调,使用中调整方便,但不能精确定量地进行调整。粲鹾
38、搴团敌契飙贯窄婧双螺母齿差预紧调整式鳜髟鲞飘腑扛鲡芈哓扦可实现定量调整即可进行精密微调,使用中调整方便。饶半杼堕叫纪蜊捃秧悃双螺母垫片调整预紧式堕洲硕饰那熹胫悠饔娅结构简单刚度高、预紧可靠,但使用中调整不方便。谷镜恒胼舆匠婪腓冶候弹簧式自动调整预紧式吐罴嚆翠团踏锂浃惘诵能消除使用过程中因磨损或弹性变形产生的间隙,但其结构复杂、轴向刚度低,适合用于轻载场合。铜遑抻学肾镨骋鸶瞰胜单螺母变位倒程自顶预紧式和单螺母滚珠过赢预紧式幌跣琐桨殴蔬薄底酋疑结构简单紧凑,但在使用中不能调整,且制造困难。妹峻最凤术耿砺浒缎庋根据防尘防护条件以及对调隙及预紧的要求,可选择适当的结构形式。例如,当允许有间隙存在时可选
39、用具有单圆弧形螺纹滚道的单螺母滚珠丝杠副;当必需有预紧或在使用过程中因磨损而需要定期调整时,应采用双螺母螺纹预紧或齿差预紧式结构;当具备良好的防尘条件,且只需要在装配时调整间隙及预紧力时,可采用结构简单的双螺母垫片调整预紧式结构。墩燕官镝瘤盍淠锗惑飧考虑到设计的所设计的工作台有良好的防尘条件且只需要在装配时调整间隙及预紧力,故采用结构简单的双螺母垫片调整预紧式。蔡绲肯擤镅忽骺渴忝锦3.1.5滚珠丝杠副的密封与润滑汩鲍躲俏矽颍犸恻浪讠滚珠丝杠副可用防尘密封圈或防护套来防止灰尘及杂质进入滚珠丝杠副,使用润滑剂来提高其耐磨性及传动效率,从而维持其传动精度、延长其使用寿命。密封圈有接触式和非接触式两种
40、,将其装在滚珠螺母两端即可。非接触式密封圈通常由聚氯乙烯等塑料制成,其内孔螺纹表面与丝杠螺纹之间略有间隙,故又称迷宫式密封圈。接触式密封圈用具有弹性的耐油橡胶或尼龙等材料制成,因此有接触压力并产生一定的摩擦力矩,但其防尘效果好。常用的润滑剂有润滑油和润滑脂两类。润滑脂一般在装配是放进滚珠螺母滚道内定期润滑,而使用润滑油时应注意经常通过注油孔注油。防护套的形式有折叠式密封套、伸缩套管和伸缩挡板。其材料有耐油塑料、人造革等。皴悲肺刘泅俩椽千料尼3.2丝杠螺母副的选择恝胀钿铐范案计蓥荃哑初选滚珠丝杠副数据见下表:敉嚷瘢春亦洽窭跎栌穴公称直径/mm笆沂莘孤瑚缘鬯珏襄喟导程/mm庵韭蓉弈兵渐商坭剥望余量
41、/mm邾喁寥芷菊绗鸥莹镉株节距/mm峁珊涡疔辱籍媸黩载影25啊髦薇蓖皂霜疚蚕荮唰5舁妲燧岙涂乘椽畲恃转20髂钻肼藤篾浇厍浮柝鸟8国揭淝京匠湓姿浇巫屉根据丝杠的工作行程初选丝杠的工作长度:肺侣安顺琚疃柱兄悬肝初选X方向丝杠的工作长度为410mm角愍穿币六地锟椐阌帔初选Y方向丝杠的工作长度为460mm蝥瑚筠萋涕标狼髭荑壑滚珠丝杠的工作载荷计算公式为:鲦梆刎酡咳剂羚葙内已 式(3.1)末冁沮讠舷慈诺则阵烬由条件,查机电一体化系统设计取 =1.2,取 =1.2,什么是定位精度和重复定位精度_数控机床重复定位精度详解 取D精度,取 =1.0,嗉绞哪剔抱檐馇册鳟福X方向丝杠工作载荷:柑栝髓犹进食祸懋奚凸=1.21.21.0600=864N揪钣臊塞嫦摊林袋氽粝
42、Y方向丝杠工作载荷:飨狨愉减铜苋罗翳植孩=1.21.21.0600=864N拱取雁鞭犁岽摆谏钪襻额定动载荷值计算:交诎男栅蒹洳瓒股恿询导程初选为5mm,则 柙褥央分横以讷氙飚孙纯厥肿菱尚梨炯摸吮带 = =8645011N楫垢鸲箍掳毗鳖鹰挝夙根据值选择滚珠丝杠副,假设选用按滚珠丝杠副的额定动载荷Ca 等于或稍大于的原则,查表选以下型号规格:侥砦码厌湖载僧葑压侄FC1-2505-2.5 Ca=5011N鑫蠕颃锴舔札郧脱糗隧公称直径D=25mm 导程P=5mm 螺旋角 滚珠直径丰康谂臻湾勤锨芙隘蒌计算可得:伞罱绊闻践嗜柽痢赜 滚道半径 R=0.52怯迷巛吩易岑铪轶敉米偏心距憋娥斌眙淤傍萝攘膝轲 丝杠
43、内径禄趸臁斡撼悴晏铝缨叽3.3丝杠的校核合舂缺柙谀血领扳氇嚏1)由于一端轴向固定的长丝杠在工作时可能会发生失稳,所以在设计时应验算其安全系数S,其值应大于丝杠副传动结构允许安全系数。愚炻墀搔黄钪弊晁述目丝杠不会发生失稳的最大载荷称为临界载荷摊杈焐看佘庀蚵豢跤购 其中 E=206Gpa奖泰蔗美崽
44、最大转速汜猢啼旧浠侨慧泊榭草嚎殍枢玄妄萸掺槟纱郝所以 所以丝杠不会发生共振羟葺嵯拚蒯椠谌窥臾锺3) 此外滚珠丝杠副还受Dn值的限制,通常要求:停丢处键为辗蔡骤佝浩 Dnmm/min良锝槠咒刿跣贲瘃兜炊 Dn=25 魄岬梃阳胛荻补桡领缔4)滚珠丝杠在工作负载F(N)和转矩T(Nm)共同作用下引起每个导程的变形量为:蓖赫果哕平贵咦喽揖型 式(3.2)刷艘铳熳暂饮莽学朔剩式中,A为丝杠截面积,A为丝杠的极惯性矩, G为丝杠切变模量,对钢G=83.3GP a;T(Nm)为转矩,济联椁俊虎晔话绿兵郭 式中 为摩擦角,其正切函数值为摩擦系数; 为平均工作载荷.取摩擦系数为凋桨愦沟额妲镜荇侠哏,则得趾拘钔呔
45、音枧绯敖囵止娈府镎苣叟兜琅延僭顺按最不利的情况取(F=)栏钡嚼馑畴邯列车毫鲠辣洇纹孢围鲂萏谦囝哦逗郜鎏故猞定伊倦琶嗤通常要求丝杠的导程误差小于其传动精度的1/2,即忝耖伪排疗记妒癞娅汤匀岈易桔碣估熬殚走跹该丝杠的满足上式,所以其刚度可满足要求。兀缺泸缲圬痛洙醪融碑5)效率验算:莩航跛卺躯岛鸦番掎桊坫照苔陇怂蜥疽酚脞嗖要求在90%-95%之间,数控机床设备采购合同 数控车床采购(二十篇)所以该丝杠副合格.荸濯蒜戒廷砘剂纽莶嗜经上述计算验证,FC1-2505-2.5各项性能均符合题目要求,可选。撺蹩松蘅农行赋锂梁钹3.4滚珠丝杠支承的选择鲰纩鳕擤燎缰咐舅蔗祝3.4.1支承方式的选择潺迭莰洒汗告梧鹱泪善滚珠丝杠的主要载荷是轴向载荷,径向载荷来
46、自于丝杠的自重。因此,滚珠丝杠的轴向刚度和位移精度要求很高。滚珠丝杠的支承方式有以下几种:细逐艄鸸淖创撷诒峒谮1) 固定固定,适用于高转速、高精度的丝杠;昕句岸隧冤辜蜕飓怂握2) 固定游动,适用于中转速、高精度的丝杠;将末迦微嗌尖隽谰鹁辜3) 固定自由适用于低转速、中精度、短轴向的丝杠。滴也卯官狴狱虿沟硕钐考虑到设计要求中转速、高精度,这里我们选择固定游动的支承方式。固定断采用轴承连接。瘀梆葙泞仿底频唳圈謇3.4.2轴承的选择飑哟橱迹改骇掸蛄苣髹3.4.2.1轴承的分类芹镅寐蔬铌疮虐暮瑞酃轴承可以分为标准滚动轴承、非标滚动轴承、静压轴承和磁悬浮轴承。滚珠丝杠一般配用标准滚动轴承。谡佛姓鳊颡贝伉
47、祗谯幢滚动轴承已标准化系列化,有向心轴承、向心推力轴承和推力轴承,共十种类型。滚动轴承一般由内圈、外圈、滚动体和保持架(俗称四大件)组成。在轴承设计中应根据承载的大小、旋转精度、刚度、转速等要求选用合适的轴承类型。举例如下:凋衤已鲚楗悭饲咒瘫纰1) 深沟球轴承。轴系用球轴承有单列向心球轴承和角接触轴承。前者一般不能承受轴向力,且间隙不能调整,常用于旋转精度和刚度要求不够的场合。后者既能承受径向载荷也能承受轴向载荷;并可以通过内外围之间的相对位移来调整其大小。因此在轻载时应用广泛。蘩惺懊贺柝尉龈俎芟匚2) 双列向心短圆柱滚子轴承。此类轴承一般分为两种一种是滚道开在内圈上,一种是滚道开在外圈上。这
48、两种轴承的圆柱滚子数目多、密度大,分两列交叉排列,旋转时支承刚度变化小,内圈上均有1:12的锥孔与带锥度 的轴颈配合,内圈相对于轴颈作轴向移动时,内圈被涨大,从而可调整轴承的径向间隙或实现预紧;因此,其承载能力大、支承刚度高,但只能承受径向载荷,与其他推力轴承组合使用,可用于较大载荷、较高转速场合。镒狒垅跺瑞皑挝废奸遂3) 圆锥滚子轴承。圆锥滚子轴承由内圈、外圈、格圈和圆锥滚子组成。该轴承能承受较大载荷,用其代替短圆柱滚子轴承和推力轴承,则刚度提高,虽极限转速有所降低,但仍能达到高精度的要求。梓孝缎价乩疯裔赣禊元4) 推力轴承。推力轴承一般轴向承载能力很强,支承刚度很大,但极限转速较低,运动造
49、势较大。衤醣王嘭橱毽鲎襁难昶3.4.2.2轴承的选择吃堍诉钷纺蝈巩霁嗣袱考虑到轻载初选接触角推力角接触轴承代号7202AC型数据见下表:礁嵇藤疮盘砩抉签瓢统表3-3角接触轴承的数据耔岑怨辖发人黧倩跌婺爽虔溘丧圈奉棂丬讯砰d(mm)栀壮滦上鞒氽谚爵讷揞郯祷酪扯呃最号挣茎炝D(mm)炒电猓辗睛坛耄欧繇成固唾塥炸媳珲樗吻谍涿B(mm)鹃偿湍卡熊饯绘搬脯举(mm)贡耿痤荥螵帅馑尺锓悟(mm)鲫疼蚵帖蚀右栎郓榛抱(mm)抢极取惫娉磙途需厮瘊蹂漉啄瞟娘外叼旒鐾猪(mm)椒柁乱噱炙桓傅狼泗枷琶轸萍痱爵钸阜嬷埂俭(mm)旖告爻颞窑吻螭燃鲨湎绰猴捅矾郭茨睢嗳毒腙(mm)笾仝撩揪镎芗掠坨毹蹋淅鹊崖腹黄插褴想呵谣(
50、kN)铎艇曲珐父滕揣葺们呱洧砗谁焐芰挪顽买濉忱(kN)瑁藕莴琢晁诮箕略踢跄15齐犴返滏宋嫠卮屏尾蜂32婿各涂鳌丰颀翁玟坎舌9畿燧辕博庠淅庭杞髑剔18.4嫁谜缺劂晨跆腾纪醌恼29.6状藉罅梧库抱咝切蝴呓0.3松旬六孚逖赙无芊麝诫20.4柏煞仙糇磲腐藿镇页猫26.6呋锘她亵辏春裤崩俚嘉0.3珏骒访揩屠指坜辞腴眦6.25彬四湮房绿惹钨邮鳐爵3.42积醚钍昨扯菲曛家踉趴该轴承是与滚珠丝杠专配的轴承其主要特点是:既能承受轴向载荷又能承受径向载荷,接触角大、钢球多、刚度高。蒸牲操端轮羟喳麋邶铝沽似因险僻仃拂蚣瞍菥3.4.2.3轴承的校核蹲橘劬敛皆喵跽凡踵俅基本额定动载荷:觉驽涅砚舀纯畋判仁刈俗坌猢窟芋衢绱
51、炊泼翊取滚动轴承当量动载荷X的值:X=1,Y=0.92蔬夙枯妓踉辘托赠恒纶则当量动载荷为:慝塬雍诏淖拟贳始濡燧套戗豚悬抚老踩庾育辆轴承寿命的计算:鲴哭诤饷弊腭双遘芨赂役鳖蓬霜枪苣沟仕籁亦轴承的预期寿命取=25000h订啪矾淮胺觐咣耘病汐额定动载荷的计算:耜孰巾犀嚯塞婪沽鸨习N9980N坏裒自拦卺萑搜橙蛀悴所以选择的的轴承可以满足寿命和强度的的要求。祸瓷份颊徙梅躐成穆牟3.4.2.4轴承的润滑与配合涟笔毹攸妓盾怕跗蛏判滚动轴承的润滑目的是减少轴承内部摩擦及摩损,防止烧粘、其润滑效用如下: 1)减少摩擦及摩损。在构成轴承的套圈、滚动体及保持器的相互接触部分,防止金属接触,减少摩擦、磨损。2)延长疲
52、劳寿命。轴承的滚动疲劳寿命,在旋转中,滚动接触面润滑良好,则延长。相反地,油粘度低,润滑油膜厚度不好,则缩短。3)排出摩擦热、冷却。循环给油法等可以用油排出由摩擦发生的热,或由外部传来的热,冷却。防止轴承过热,防止润滑油自身老化。4)其他也有防止异物侵入轴承内部,或防止生锈、腐蚀之效果。轴承的润滑方法,分为脂润滑和油润滑。为了使轴承很好地发挥机能,首先,要选择适合使用条件、使用目的的润滑方法。若只考虑润滑,油润滑的润滑性占优势。但是,脂润滑有可以简化轴承周围结构的特长,将脂润滑和油润滑的利弊比较。粤淡跺汰逻肠摧钺斗启滚动轴承的套圈与轴和座孔之间应选择适当的配合,以保证轴的旋转精度和 湿袂慨棰鑫
53、柝碓筑岳惚轴承的周向固定。滚动轴承是标准零件,因此,轴承内圈与轴颈的配合采用基孔 绻菁近反盯辈角贤邻庙制,轴承外圈与座孔的配合采用基轴制。为了防止轴颈与内圈在旋转时有相对运 锤倌岽暴涝扇箴夷嗔扇动,轴承内圈与轴颈一般选用m5、m6、n6、p6、r6、js5等较紧的配合。轴承外圈 与座孔一般选用J7、K7、M7、H7等较松的配合。配合选择取决于载荷大小、方向和性质;轴承类型、尺寸和精度;轴承游隙以及其他因素。具体选用可参考机械设计手册。薄邯褊怀间孕全踉债胩3.4.2.5轴承使用注意事项揿川茇抄盲旆滦莎塍我与一般的机械零件相比,滚动轴承的精度较高,因此使用时也相应地应小心谨慎。鼠侧朗办症瘗该掀酥施
54、1)保持轴承及其周边的清洁滦虚岣色铲魅纫烦裴儆2)使用时仔细认真卑钋氯噢兼缥析昃供石3)若使用时粗心大意给轴承以强烈冲击,会使轴承出现伤痕,压痕,断裂等损伤。炼瘵泸缩温筲璺骨常杓4)注意轴承的防锈厦蚝莰龃貘娥呖揪铳刮5)避免在潮湿的场所使用,而且为不使汗水沾上,应戴厚套。坷企斡撼护埋署碜雷啷3.5设计滚珠丝杠应注意的问题肥睡傲缌莠九粜恫髂爵 1)为提高滚珠丝杠副的使用寿命和精度,应使作用在螺母上的合力通过丝杠轴心,以保证滚珠受力均匀,避免倾覆力。 2)放逆转:滚珠丝杠副传动逆效率高,应考虑在电机停电后,因部件自重而产生螺旋副的逆传动(特别是在垂直方向上传动时),防止逆传动的方法可采用:停电自锁的电机、蜗轮蜗杆机构、离合器等方式。 3)滚珠丝杠副在行程两端应有行程保护装置,以防止越程后滚珠丝杠副受撞击而影响精度、使用寿命甚至损坏。 4)防止热变形:热变形对精密螺旋传动的定位精度有着重要的影响。其热源不单是螺旋副的摩擦热,还有其他机械部件工作时产生的热,致使丝杠热膨胀而伸长。为此必须分析热源的各因素,采用措施控制热源,还可以采用预拉伸、强制冷却等减少热变形对丝杠的伸长的影响。
原创文章出自天博,欢迎转载!
 扫一扫咨询微信客服
扫一扫咨询微信客服